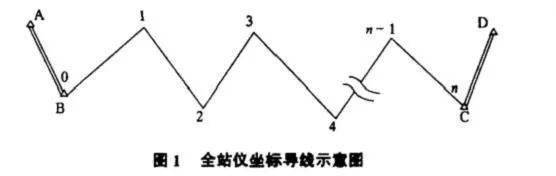
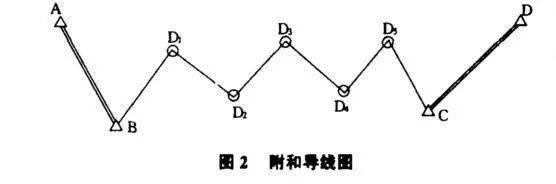
全站仪坐标导线测量 以附合导线为例,如图1 所示,A、B、C、D 为已知控制点,中间各点为导线点,全站仪导线测量方法如下: 首先将全站仪安置于已知点B上,利用全站仪的三维坐标测量功能和微电脑记忆功能,输入已知点A、B的三维坐标、方位以及仪器和觇标高度后,全站仪瞄准A点定位,测记前视导线点2坐标;然后将仪器移至2 (关电源) ,继续不断测记新导线点3、4 ⋯坐标。全站仪将自动地显示各导线点的三维坐标,并记录在电子手簿上,而不需内业计算,直接在现场完成三维导线测量。 全站仪几种平差方法简述 1) 第一种方法称为坐标转换平差法,其基本思想就是: 通过坐标的旋转、平移和尺度统一等转换方法将带有观测误差的坐标值归算到平差后的坐标值。具体做法是,先根据导线起点和终点的坐标闭合差计算出坐标转换参数,再以求得的转换参数对其他导线点的观测坐标进行转换,求得各点的坐标改正数,从而求得各导线点的平差坐标[ 1 ] 。 2) 第二种方法的求值过程是: 根据观测坐标和已知坐标,计算各导线点闭合差方程系数ak1、ak2及bk1、bk2 ( k = 1 ,2 , ⋯) ;计算导线角度改正数Vβ 和测距相对误差Vs;计算各未知导线点的闭合差f xk, f yk( k = 1 , 2 , ⋯,n);最后计算未知导线点的坐标平差值[ 2 ] 。 3) 第三种方法的基本思路是: 通过完善观测条件,即增测终边另一端点坐标,同时构成坐标条件与方位角条件,获得坐标闭合差与角度闭合差,并从误差分析入手,推导出角度误差对坐标的影响,从而将坐标闭合差分解为角度误差与边长误差两部分,再分别进行平差[ 3 ] 。 4) 第四种方法采用间接平差原理: 平差时取待定点的坐标平差值作为未知数,通过平差就直接得到了各待定点的坐标平差值。这种平差方法的误差方程式只有角误差方程式与边误差方程式两种类型。在全部列出角、边误差方程式并检核无误后,即可按一般的间接平差步骤计算待定点坐标平差值[ 4 ] 。 这四种方法,第二种平差方法较适用于直伸形导线,而对于曲折形导线其平差结果的误差较大;第三种平差方法对于完整的附和导线才能采用;第四种平差方法列立方程以及计算比较繁琐。而第一种平差方法的数学模型简单易懂,计算只需简单的四则运算。下面简单叙述一下方法1) 的公式推导过程: 算例 如图2 所示,分别采用经纬仪导线测量方法和全站仪坐标导线测量方法进行测量,A、B、C、D 为已知控制点,D1、D2、D3、D4、D5为待测导线点,分别按坐标转换法平差、经纬仪导线平差法计算导线各点的坐标平差值,结果见表1 。 结语 由此可见,经纬仪导线坐标平差方法与全站仪坐标平差方法的计算结果基本一致,且后者计算简单可行,精度也符合要求。在全站仪不断普及与全站仪导线被广泛采用的今天,该方法还是切实可用的。